Problem Statement
A sample material has properties of E=100 GPa, rho=0.3, m(rate sensitivity)= 0.01, and h=1000 MPa. The initial yield stress is 100 MPa. This material undergoes the isochoric deformation process described by

where


Code
This MATLAB Script I developed compares explicit and implicit solution methods. The explicit method solves equations for 

% ME 6203 Time Integration Scheme
% Pierce Heintzelman
clear
clc
clf
% Start with explicit scheme
% Known Constants
E = 100e9; %Pa
nu = 0.3;
% Shear Modulus
mu=E/2/(1+nu);
k = E/3/(1-2*nu);
lam = k-2/3*mu;
% Tensor - Reduced Form 6x6
C=[[lam+2*mu,lam,lam,0,0,0];[lam,lam+2*mu,lam,0,0,0];...
[lam,lam,lam+2*mu,0,0,0];[0,0,0,2*mu,0,0];...
[0,0,0,0,2*mu,0];[0,0,0,0,0,2*mu]];
% plasticity parameters
edot = 0.001;
m = 0.01;
h = 1000e6; %Pa
so = 100e6; %Initial Yield Stress in PA
% Initial strain based on problem statemnt
eo = [.002*ones(1000,1)', -.001*ones(1000,1)', -.001*ones(1000,1)',...
.001*ones(1000,1)'];
% Initialize stress
sigma0 = [0,0,0,0,0,0]';
ttime = 40;
dtime = ttime/length(eo);
t = dtime:dtime:40;
%Initialize arrays
sig11 = zeros(length(eo),1);
sig22 = zeros(length(eo),1);
sig23 = zeros(length(eo),1);
e11 = zeros(length(eo),1);
e22 = zeros(length(eo),1);
e23 = zeros(length(eo),1);
tic
for i = 1:length(eo)
if i == 1
sigma_t = sigma0;
s_t = so;
end
sig11(i) = sigma_t(1);
sig22(i) = sigma_t(2);
sig23(i) = sigma_t(6);
erate = [eo(i),-1*eo(i), 0, 0, 0.5*eo(i), 0.5*eo(i)]';
% Keeping track of strain
if i>=2
e11(i) = e11(i-1) + erate(1)*dtime;
e22(i) = e22(i-1) + erate(2)*dtime;
e23(i) = e23(i-1) + erate(6)*dtime;
end
mises_t = sqrt(0.5*((sigma_t(1)-sigma_t(2))^2 +...
(sigma_t(2) - sigma_t(3))^2 ...
+ (sigma_t(1) - sigma_t(3))^2+3*(sigma_t(4)^2+sigma_t(5)^2+...
sigma_t(6)^2)));
peeqdot = edot * (mises_t/s_t)^(1/m);
press = (sigma_t(1) + sigma_t(2) + sigma_t(3))/3;
dev_t = sigma_t - press*[1,1,1,0,0,0]';
if mises_t==0
epdot = [0,0,0,0,0,0]';
else
epdot = 3/2*peeqdot*dev_t/mises_t;
end
% update stress and strength values
sigma_tau = C * (erate-epdot)*dtime + sigma_t;
sigma_t = sigma_tau;
s_tau = h*peeqdot*dtime + s_t;
s_t = s_tau;
end
toc
hold on
figure(1)
plot(e11, sig11)
figure(2)
plot(e22, sig22)
figure(3)
plot(e23, sig23)
figure(4)
plot(t, sig11, t, sig22, t, sig23)
xlabel('Time [s]')
ylabel('Stress [Pa]')
legend('11 Direction','22 Direction', '23 Direction', 'Location', 'northwest')
ylim([-1.1e8 1.1e8])
%DT = .001
% Initial strain based on problem statemnt
eo = [.002*ones(10000,1)', -.001*ones(10000,1)', -.001*ones(10000,1)',...
.001*ones(10000,1)'];
% Initialize stress
sigma0 = [0,0,0,0,0,0]';
ttime = 40;
dtime = ttime/length(eo);
t = dtime:dtime:40;
%Initialize arrays
sig11 = zeros(length(eo),1);
sig22 = zeros(length(eo),1);
sig23 = zeros(length(eo),1);
e11 = zeros(length(eo),1);
e22 = zeros(length(eo),1);
e23 = zeros(length(eo),1);
tic
for i = 1:length(eo)
if i == 1
sigma_t = sigma0;
s_t = so;
end
sig11(i) = sigma_t(1);
sig22(i) = sigma_t(2);
sig23(i) = sigma_t(6);
erate = [eo(i),-1*eo(i), 0, 0, 0.5*eo(i), 0.5*eo(i)]';
% Keeping track of strain
if i>=2
e11(i) = e11(i-1) + erate(1)*dtime;
e22(i) = e22(i-1) + erate(2)*dtime;
e23(i) = e23(i-1) + erate(6)*dtime;
end
mises_t = sqrt(0.5*((sigma_t(1)-sigma_t(2))^2 +...
(sigma_t(2) - sigma_t(3))^2 ...
+ (sigma_t(1) - sigma_t(3))^2+3*(sigma_t(4)^2+...
sigma_t(5)^2+sigma_t(6)^2)));
peeqdot = edot * (mises_t/s_t)^(1/m);
press = (sigma_t(1) + sigma_t(2) + sigma_t(3))/3;
dev_t = sigma_t - press*[1,1,1,0,0,0]';
if mises_t==0
epdot = [0,0,0,0,0,0]';
else
epdot = 3/2*peeqdot*dev_t/mises_t;
end
% update stress and strength values
sigma_tau = C * (erate-epdot)*dtime + sigma_t;
sigma_t = sigma_tau;
s_tau = h*peeqdot*dtime + s_t;
s_t = s_tau;
end
toc
figure(1)
hold on
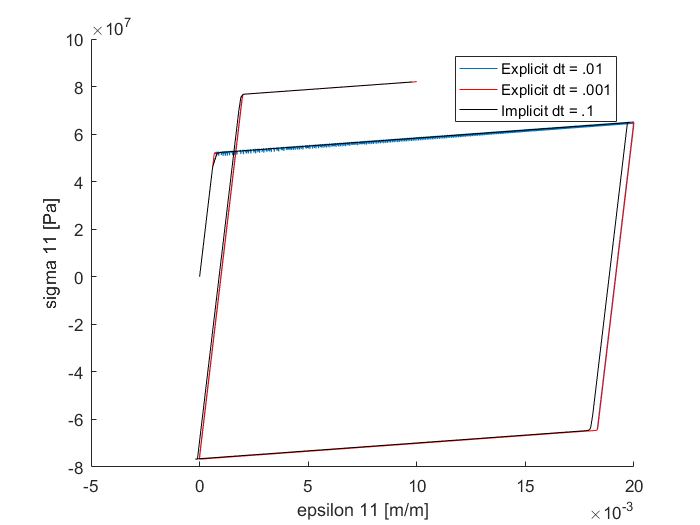
plot(e11, sig11,'r')
xlabel('epsilon 11 [m/m]')
ylabel('sigma 11 [Pa]')
% title('Response in 11 Direction')
legend('Explicit dt = .01','Explicit dt = .001')
figure(2)
hold on
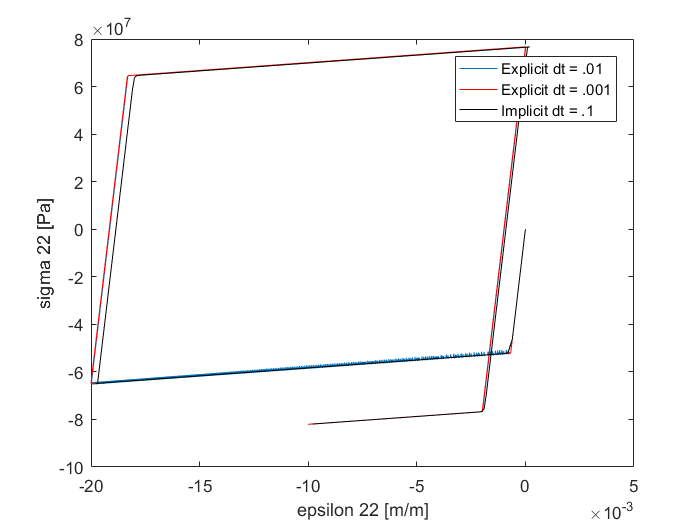
plot(e22, sig22,'r')
xlabel('epsilon 22 [m/m]')
ylabel('sigma 22 [Pa]')
% title('Response in 22 Direction')
legend('Explicit dt = .01','Explicit dt = .001')
figure(3)
hold on
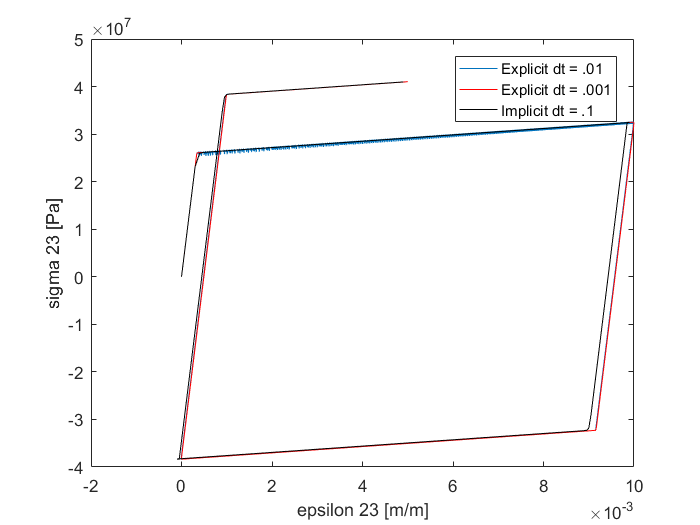
plot(e23, sig23,'r')
xlabel('epsilon 23 [m/m]')
ylabel('sigma 23 [Pa]')
% title('Response in 23 Direction')
legend('Explicit dt = .01','Explicit dt = .001')
figure(5)
plot(t, sig11, t, sig22, t, sig23)
xlabel('Time [s]')
ylabel('Stress [Pa]')
legend('11 Direction','22 Direction', '23 Direction', 'Location', 'northwest')
ylim([-1.1e8 1.1e8])
%Implicit Scheme
%Initialize arrays
eo = [.002*ones(100,1)', -.001*ones(100,1)', -.001*ones(100,1)',...
.001*ones(100,1)'];
sig11 = zeros(length(eo),1);
sig22 = zeros(length(eo),1);
sig23 = zeros(length(eo),1);
e11 = zeros(length(eo),1);
e22 = zeros(length(eo),1);
e23 = zeros(length(eo),1);
dtime = ttime/length(eo);
t = dtime:dtime:40;
tol = 1e-3; %set tolerance
tic
for i = 1:length(eo)
if i==1
sigma_t = sigma0;
s_t = so;
end
sig11(i) = sigma_t(1);
sig22(i) = sigma_t(2);
sig23(i) = sigma_t(6);
%strain rate at current time step
erate = [eo(i),-1*eo(i), 0, 0, 0.5*eo(i), 0.5*eo(i)]';
% strain(tau) = strain(t) + strain_rate*dtime
if i>=2
e11(i) = e11(i-1)+erate(1)*dtime;
e22(i) = e22(i-1)+erate(2)*dtime;
e23(i) = e23(i-1)+erate(6)*dtime;
end
%calculate trial stresses - elastic predictor
sig_tr = C*erate*dtime+sigma_t;
press = (sig_tr(1) + sig_tr(2) + sig_tr(3))/3;
dev_tr = sig_tr - press*[1,1,1,0,0,0]';
% Find mises equivalent of t and trial stress
mises_t = sqrt(0.5*((sigma_t(1)-sigma_t(2))^2 + ...
(sigma_t(2) - sigma_t(3))^2 ...
+ (sigma_t(1) - sigma_t(3))^2+3*(sigma_t(4)^2+...
sigma_t(5)^2+sigma_t(6)^2)));
mises_tr = sqrt(0.5*((sig_tr(1)-sig_tr(2))^2 +...
(sig_tr(2) - sig_tr(3))^2 ...
+ (sig_tr(1) - sig_tr(3))^2+3*(sig_tr(4)^2+...
sig_tr(5)^2+sig_tr(6)^2)));
%Newton Raphson iterations
mises_tau = mises_tr;
s_tau = s_t;
for j = 1:500
peeqdot = edot*(mises_tau/s_tau)^(1/m);
g1 = mises_tr-mises_tau - 3*mu*peeqdot*dtime;
g2 = s_tau-s_t-h*peeqdot*dtime;
g = [g1 g2]';
y = [mises_tau s_tau]';
g1m = -1-3*mu*edot*dtime/m*((mises_tau/s_tau)^(1/m-1))/s_tau;
g1s = 3*mu*dtime/m*peeqdot/s_tau;
g2m = -1*h*edot*dtime/m*((mises_tau/s_tau)^(1/m-1))/s_tau;
g2s = 1+h*dtime/m*peeqdot/s_tau;
J = [[g1m g1s];[g2m g2s]];
y = y-(inv(J))*g;
mises_tau = y(1);
s_tau = y(2);
if abs(g1)<tol*so && abs(g2) < tol*so
break
end
if j==50
disp('Implicit method not converged.')
end
end
corrf = 1+3*mu*edot*dtime*(mises_tau/s_tau)^(1/m-1)/s_tau;
dev_tau = dev_tr/corrf;
sigma_tau = dev_tau+press*[1,1,1,0,0,0]';
%stress strength update
sigma_t = sigma_tau;
s_t = s_tau;
end
toc
figure(1)
hold on
plot(e11, sig11,'k')
legend('Explicit dt = .01','Explicit dt = .001','Implicit dt = .1')
figure(2)
hold on
plot(e22, sig22,'k')
legend('Explicit dt = .01','Explicit dt = .001','Implicit dt = .1')
figure(3)
hold on
plot(e23, sig23,'k')
legend('Explicit dt = .01','Explicit dt = .001','Implicit dt = .1')
figure(6)
plot(t, sig11, t, sig22, t, sig23)
xlabel('Time [s]')
ylabel('Stress [Pa]')
legend('11 Direction','22 Direction', '23 Direction', 'Location', 'northwest')
ylim([-1.1e8 1.1e8])Graphical Results
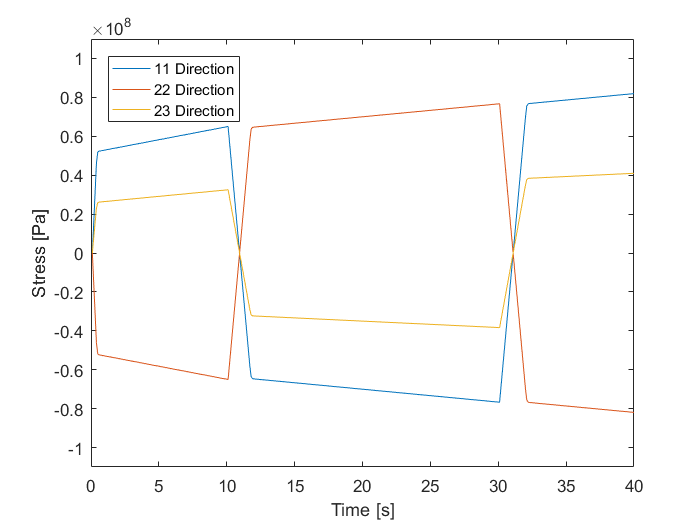


Slide 1: Stress vs Time Implicit Scheme with dt = .1 s
Slide 2: Stress vs Time Explicit Scheme with dt = .01 s
Slide 3: Stress vs Time Explicit Scheme with dt = .001 s
Slide 4: Stress vs Strain in 11 direction
Slide 5: Stress vs Strain in 22 direction
Slide 6: Stress vs Strain in 23 direction
Conclusion
Explicit schemes, while easier to understand conceptually and code, require time steps to converge that are orders of magnitude smaller than those required for implicit schemes. In this problem, a time step 100 times finer was needed for the explicit solution be identical to the implicit solution. Due to these smaller time steps, computation time suffers and therefore implicit schemes should be used in situations where computational efficiency is required. Although implicit schemes are more mathematically rigorous, they are worth the initial effort due to their ease of convergence and decrease in computing time.
